MEMS high-performance inertial navigation system module
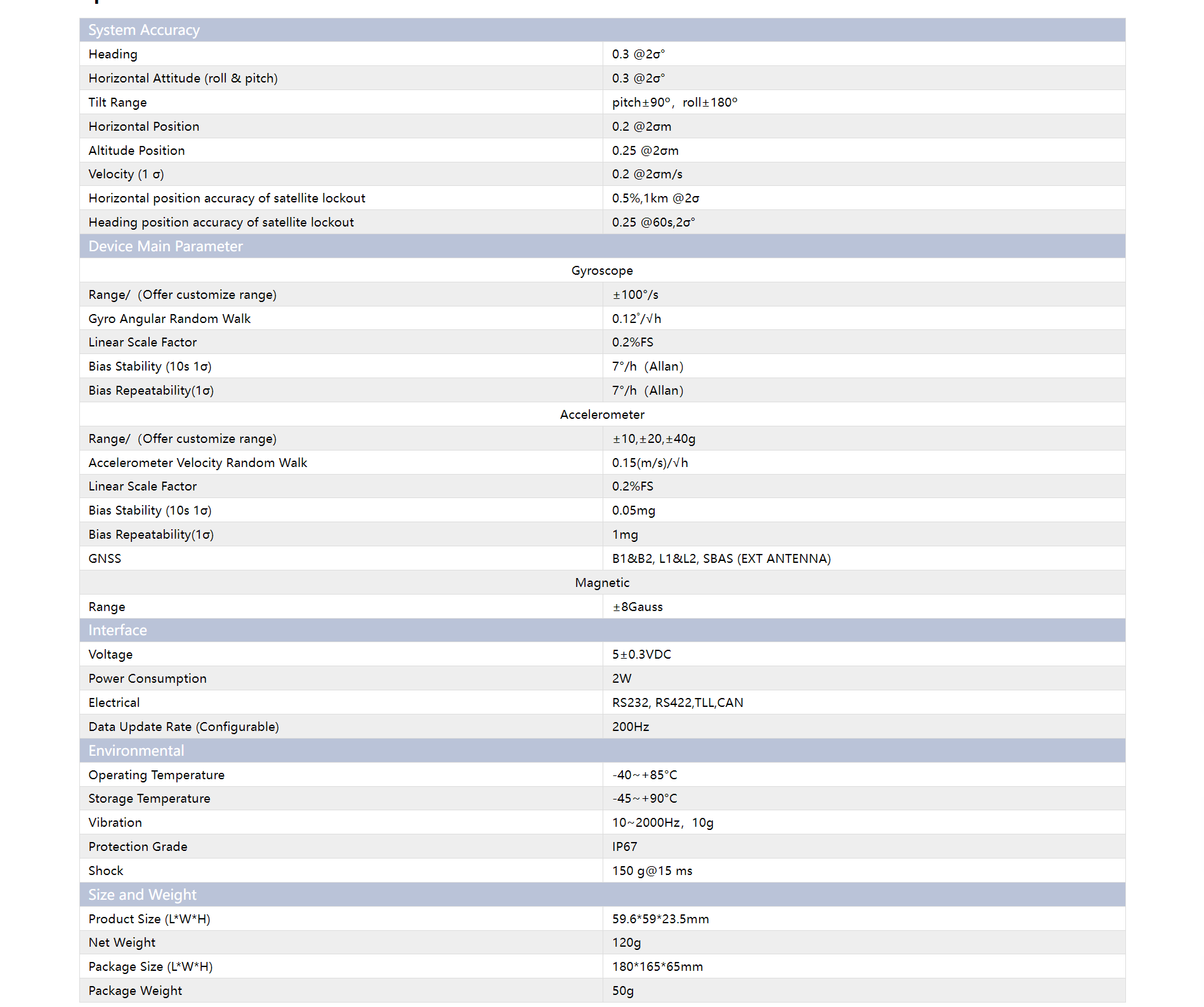
I600 is a high-performance MEMS inertial navigation system product that can automatically calculate the azimuth, roll angle, pitch angle, angular velocity, acceleration, Euler angle, and quaternion information of the measured carrier through acceleration and angular velocity information without relying on external signal input. It is suitable for inertial attitude measurement in various states of motion, vibration, or rest.
I600 is a high-performance MEMS inertial navigation system product that can automatically calculate the azimuth, roll angle, pitch angle, angular velocity, acceleration, Euler angle, and quaternion information of the measured carrier through acceleration and angular velocity information without relying on external signal input. It is suitable for inertial attitude measurement in various states of motion, vibration, or rest.
This product adopts highly reliable MEMS accelerometers and gyroscopes. The attitude information data deviation is estimated through a 6-state Kalman filter with appropriate gain, and the measurement accuracy is guaranteed through algorithms. The attitude motion parameters are compensated through various methods such as nonlinear compensation, orthogonal compensation, temperature compensation, and drift compensation, which can greatly eliminate errors and improve the product accuracy level. This product has a digital interface and can be easily integrated into the system.